Tutorial¶
Example 1: Expose some random number(s)¶
Define PV database¶
Suppose we want to have one PV returning a random number, we define it like this:
prefix = 'MTEST:'
pvdb = {
'RAND' : {
'prec' : 3,
},
}
pvdb is a plain Python dict, in which keys are PV base names and values are their configurations, a dict also.
In this case we specify that the PV has base name RAND and 3 digits precision.
prefix will be the prefixed to the PV base names and create the PV MTEST:RAND.
Refer to Database Field Definition about full description of database definition.
Dummy server¶
Here is the source code dummy.py.
Our first attempt is to implement a server so it blindly accepts any value written and gives it back upon request. Two classes are required,:
from pcaspy import SimpleServer, Driver
Driver class is the base class that connects channel access requests with real world data source.
The base class implementation simply stores the value written by user and retrieves upon request.
All the derived class does is to call base class’s Driver.__init__() to ensure proper setup.:
class myDriver(Driver):
def __init__(self):
super(myDriver, self).__init__()
SimpleServer is the class that responds to channel access requests.
We would never need to modify it. We only need to instantiate it.:
if __name__ == '__main__':
server = SimpleServer()
And create all PVs based on prefix and pvdb definition.:
server.createPV(prefix, pvdb)
driver = myDriver()
In the end we start the processing loop.:
while True:
# process CA transactions
server.process(0.1)
Now try some caget/caput,:
$ caput MTEST:RAND 0
Old : MTEST:RAND 2
New : MTEST:RAND 0
$ caput MTEST:RAND -1.23
Old : MTEST:RAND 0
New : MTEST:RAND -1.23
$ caget MTEST:RAND
MTEST:RAND -1.23
Notice that the procedure to instantiate server, PVs and driver remains identical afterwards. So later we will not show this part.
Return a random number¶
It is not very interesting to be just an echo. We will return a random number upon every read request. We need to override read method in our subclass myDriver.:
import random
class myDriver(Driver):
def __init__(self):
super(myDriver, self).__init__()
def read(self, reason):
if reason == 'RAND':
value = random.random()
else:
value = self.getParam(reason)
return value
Note
Driver.__init__()must be called before using anyDriver.getParam()Driver.setParam()calls.The
readmethod accepts one parameterreasonand it is the PV base name as defined inpvdb. In this function, we return a random number whenRANDis being read.
Scan periodically¶
So far this PV updates only when clients read. It can also update itself periodically if we define the scan field,:
pvdb = {
'RAND' : {
'prec' : 3,
'scan' : 1,
},
}
Now the PV will update every second. Monitor the change,:
$ camonitor MTEST:RAND
MTEST:RAND 2011-07-19 12:32:06.574775 0.646198
MTEST:RAND 2011-07-19 12:32:07.574704 0.872313
MTEST:RAND 2011-07-19 12:32:08.581681 0.171537
MTEST:RAND 2011-07-19 12:32:09.581581 0.351235
Note
The scan thread is implemented per PV and the scan interval can be arbitrary. In comparison the EPICS database scan thread is implemented per IOC and scan interval is defined in database definition.
Return a series of random numbers¶
Suppose we want to return more random numbers, 10 e.g. Add count field in pvdb,:
pvdb = {
'RAND' : {
'prec' : 3,
'scan' : 1,
'count': 10,
},
}
We modify the read method to return a list of 10 random numbers,:
...
if reason == 'RAND':
return [random.random() for i in range(10)]
...
Here is the final source code get_random.py
Remark¶
This first demo shows the basics of how to configure PV attributes and respond to read access.
One thing to emphasise is that Driver.read() is called each time a ca_get request comes in.
In a realistic application, the PV values are normally polled, in a periodical or triggered way,
from external sources. As so the PV values will be stored in a parameter cache (Driver.setParam()) at the point of being fetched.
The derived driver does not need to override Driver.read().
The values are simply fetched from the parameter cache (Driver.getParam()).
This principle is followed by all the following examples.
Example 2: Interface to any shell command¶
Here is the full source code pysh.py
Define PV database¶
Suppose we want to run a shell command and publish its results as an EPICS channel.:
prefix = 'MTEST:'
pvdb = {
'COMMAND' : {
'type' : 'string',
},
'OUTPUT' : {
'type' : 'string',
},
'STATUS' : {
'type' : 'enum',
'enums': ['DONE', 'BUSY']
},
'ERROR' : {
'type' : 'string',
},
}
MTEST:COMMAND contains the command to execute. Its output will be stored in MTEST:OUTPUT.
Its possible error will be stored in MTEST:ERROR.
MTEST:STATUS indicates whether the command finishes running or not.
Implement myDriver¶
We do the normal inheritance of Driver,:
import thread
import subprocess
import shlex
from pcaspy import Driver, SimpleServer
class myDriver(Driver):
def __init__(self, server):
Driver.__init__(self, server)
# shell execution thread id
self.tid = None
In this driver, readout is done through the default implementation of Driver, which retrieves the value with Driver.getParam().
So we will not override Driver.read().
write method¶
In the write method, we only respond to the write request of MTEST:COMMAND.
If there is no command running, we spawn a new thread to run the command in runShell.:
def write(self, reason, value):
status = True
if reason == 'COMMAND':
if not self.tid:
command = value
self.tid = thread.start_new_thread(self.runShell,(command,))
else:
status = False
else:
status = False
# store the values
if status:
self.setParam(reason, value)
return status
Note
Portable channel access server is single threaded so we should avoid blocking the
writemethod by any means. In this case we run the command in a new thread.We have limited the running command to one. Until the running thread finishes,
status = Falseis returned to refuse further requests and the client may see a put failure.We assign
status = Falseto refuse change requests ofOUTPUT,ERRORandSTATUS. This makes them effectively read-only.
Execution thread¶
In our command execution thread, we run the command with subprocess module.
The subprocess’s stdout and stderr outputs are redirected to channel MTEST:OUTPUT and MTEST:ERROR.
Upon exception MTEST:ERROR has the exception message.
Before and after command execution we update MTEST:STATUS channel. We call Driver.updatePVs() to inform clients about PV value change.:
def runShell(self, command):
# set status BUSY
self.setParam('STATUS', 1)
self.updatePVs()
# run shell
try:
proc = subprocess.Popen(shlex.split(command),
stdout = subprocess.PIPE,
stderr = subprocess.PIPE)
proc.wait()
except OSError, m:
self.setParam('ERROR', str(m))
self.setParam('OUTPUT', '')
else:
self.setParam('ERROR', proc.stderr.read().rstrip())
self.setParam('OUTPUT', proc.stdout.read().rstrip())
# set status DONE
self.setParam('STATUS', 0)
self.updatePVs()
self.tid = None
Now we can run some commands to see the output,:
$ caput MTEST:COMMAND "whoami"
Old : MTEST:COMMAND
New : MTEST:COMMAND whoami
$ caget MTEST:OUTPUT
MTEST:OUTPUT wang_x1
Make it asynchronous¶
As we have noted, the command normally would take an undetermined time to finish running. In addition to yield MTEST:STATUS to indicate completion.
We could make MTEST:COMMAND asynchronous, and notify upon completion if client has called ca_array_put_callback.
Add a new field asyn to COMMAND to indicate that this PV finishes writing asynchronously,:
'COMMAND' : {
'type' : 'string',
'asyn' : True
},
In thread runShell, we call Driver.callbackPV() to notify the processing is done.:
# run shell
...
self.callbackPV('COMMAND')
# set status DONE
Now run it again and notice the delay,:
$ caput -w 10 -c MTEST:COMMAND "sleep 5"
Old : MTEST:COMMAND whoami
New : MTEST:COMMAND sleep 5
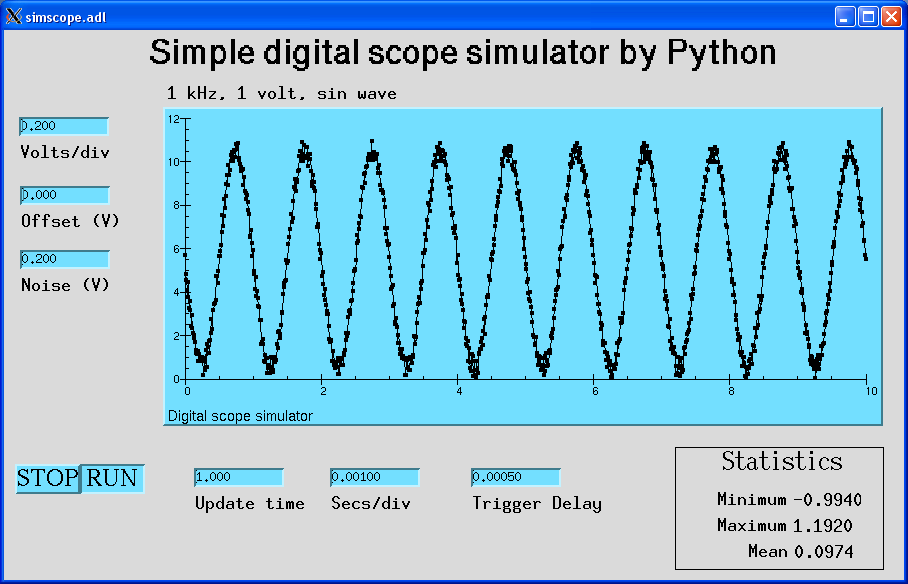
Example 3: A Simulated Oscilloscope¶
Until now the driver principles have all been introduced by these two trivial examples. I cannot find more realistic examples, so I port this asynPortDriver example. Its intention is stated clearly by Mark Rivers,
This example is a simple digital oscilloscope emulator. In this example all of output control and input data is done in a calculated simulation. But it is easy to see how to use the driver as a basis for real device control. The code doing the simulation would simply be changed to talk to an actual device.
The python version in PCASpy is simscope.py. To best check how it functions, launch the medm panel,:
medm -x -macro P=MTEST simscope.adl
Note
The value passed to
setParamcould be Python builtin types: str, float, int, list, tuple or numpy data types: int8/16/32, float32/64, ndarray.
Example 4: Integrate into GUI applications¶
In the above examples, the server process loop is running in the main thread. GUI applications require their own event loop running in the main thread also. In such applications the server process loop could run in a separate thread and yield the main thread to the GUI event loop.
A helper class ServerThread can be used to execute the server in a separate thread.
The following runs the server for ~4 seconds and exits. The debug output shows the server process.:
import time
from pcaspy import SimpleServer
from pcaspy.tools import ServerThread
server = SimpleServer()
server.setDebugLevel(4)
server_thread = ServerThread(server)
server_thread.start()
time.sleep(4)
server_thread.stop()
Qt GUI integration¶
qtgui.py shows how to combine it with Qt GUI event loop.
Example 5: Access Security Control¶
We already could refuse user written values in write method as done in Example 3.
In addition it is possible to use access security rules as in the EPICS database.
Define the access security rule¶
Suppose PV MTEST:LEVEL indicates the liquid nitrogen level and PV MTEST:FILL is the commanded amount of liquid nitrogen to refill.
We want to refuse user’s filling request when level is above 5.:
# test.as
# Access security rules
ASG(fill) {
INPA($(P)LEVEL)
RULE(1, READ)
RULE(1, WRITE){
CALC("A<5")
}
}
It defines a rule fill, which grants read access but limits write access to $(P)LEVEL below 5.
Refer to EPICS Application Developer’s Guide
about details.
Use security rules¶
In the database, MTEST:FILL has field asg set to the defined access rule fill.:
prefix = 'MTEST:'
pvdb = {
'LEVEL': {},
'FILL' : {'asg' : 'fill',},
}
Before PVs are created, the access rules defined in the first step must be activated,:
...
server = SimpleServer()
server.initAccessSecurityFile('test.as', P=prefix)
server.createPV(prefix, pvdb)
...
Test¶
$ caput MTEST:LEVEL 2
Old : MTEST:LEVEL 0
New : MTEST:LEVEL 2
$ caput MTEST:FILL 5
Old : MTEST:FILL 0
New : MTEST:FILL 5
$ caput MTEST:LEVEL 6
Old : MTEST:LEVEL 2
New : MTEST:LEVEL 6
$ caput MTEST:FILL 8
Old : MTEST:FILL 5
New : MTEST:FILL 5
$ cainfo MTEST:FILL
MTEST:FILL
State: connected
Host: slslc06.psi.ch:5064
Access: read, no write
Native data type: DBF_DOUBLE
Request type: DBR_DOUBLE
Element count: 1
Other Tips¶
Hold string having more than 40 characters¶
string type is limited to 40 characters (at least in EPICS 3.14). To overcome this limit, use char type:
'STATUS' : {
'type': 'char',
'count' : 300,
'value' : 'some initial message. but it can become very long.'
}
Later in the driver application, it can be accessed just like string parameter, e.g.:
self.setParam('STATUS', 'an error is happened')
print self.getParam('STATUS')
Alarm status and severity¶
For numerical type, the fields lolo, low, high, hihi determine the alarm status and severity:
'VOLTAGE' : { 'hihi' : 10, 'high' : 5, 'low' : -5, 'lolo' :-10 }
For enumerate type, the fields states determine the alarm status:
'STATUS' : { 'type' : 'enum', 'enums': ['OK', 'ERROR'], 'states': [Severity.NO_ALARM, Severity.MAJOR_ALARM] }
For string type, the alarm status and severity can be changed by
Driver.setParamStatus().
Check out the reference Driver.setParam() and Driver.setParamStatus(),
and alarm severity example.
Dynamic properties¶
For enumerate type, the choices are specified by field enums at startup. If in case the choices should be changed
at runtime, Driver.setParamEnums() can be used. For numerical type, the precision, units, limits can also be changed
by Driver.setParamInfo(). Check out the
dynamic enums example.
To see the effect, use the following script:
import time
from CaChannel import ca, CaChannel
def monitor_callback(epics_arg, user_arg):
if epics_arg['type'] == ca.DBR_CTRL_DOUBLE:
print('units:', epics_arg['pv_units'])
elif epics_arg['type'] == ca.DBR_CTRL_ENUM:
print('enums:', epics_arg['pv_statestrings'])
enum = CaChannel('MTEST:ENUM')
enum.searchw()
enum.add_masked_array_event(ca.DBR_CTRL_ENUM, None, ca.DBE_PROPERTY, monitor_callback)
rand = CaChannel('MTEST:RAND')
rand.searchw()
rand.add_masked_array_event(ca.DBR_CTRL_DOUBLE, None, ca.DBE_PROPERTY, monitor_callback)
rand.flush_io()
while True:
time.sleep(1)
Now try to change the enum state and of MTEST:ENUM and units of MTEST:RAND.
$ caput MTEST:CHANGE 4
$ caput MTEST:RAND.EGU 'eV'
The script shall have the following output.
enums: ('ZERO', 'ONE')
units:
enums: ('ZERO', 'ONE', 'TWO', 'THREE')
units: eV
Create PVs using different prefix¶
Suppose one would want to create PVs with different prefix, maybe to distinguish their subsystem.
It turns out to be quite easy, call SimpleServer.createPV() for each of them.:
prefix1='MTEST-1'
pvdb1={
'SIGNAL1': {},
}
prefix2='MTEST-2'
pvdb2={
'SIGNAL2': {},
}
...
server.createPV(prefix1, pvdb1)
server.createPV(prefix2, pvdb2)
Note however that the PV base name must not be the same, because Driver class uses PV base name as its identity.
